|
|
 发表于 2020-1-8 11:56:37
来自手机
|
显示全部楼层
发表于 2020-1-8 11:56:37
来自手机
|
显示全部楼层
看到了,说明书法最好。
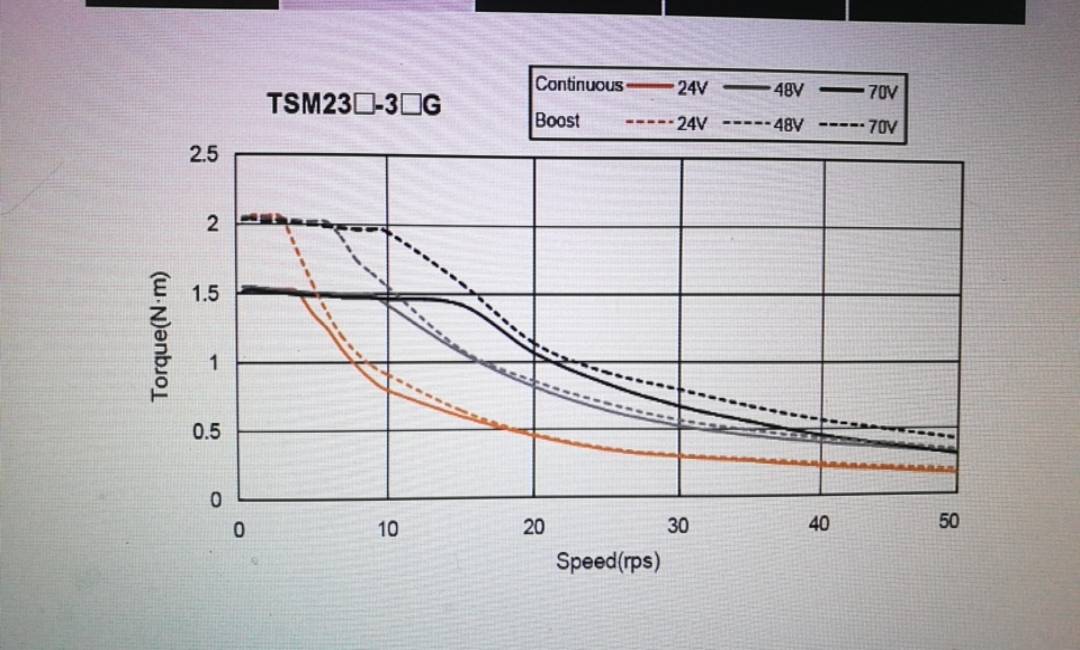
- c7 Q4 I7 c. ?! [# a' d: L1 i电机和电机不相同的,步进和伺服不一样,伺服通常标称扭矩会比步进小,伺服恒扭矩(转矩),步进随着转速会断崖式下降,所以通常60伺服劲比57步进大,但是57步进的峰值扭矩更高,10转以内(F600左右)加速快,步进是不均匀加速,伺服的加速均匀性好。, E( Z4 W% U% W. V" v
下面是我的电机(中档步进)标称1.5牛.米:8 a0 n e8 D7 B% Q, G0 @
 |
|











