|
|
 发表于 2020-1-10 22:07:08
来自手机
|
显示全部楼层
发表于 2020-1-10 22:07:08
来自手机
|
显示全部楼层
|
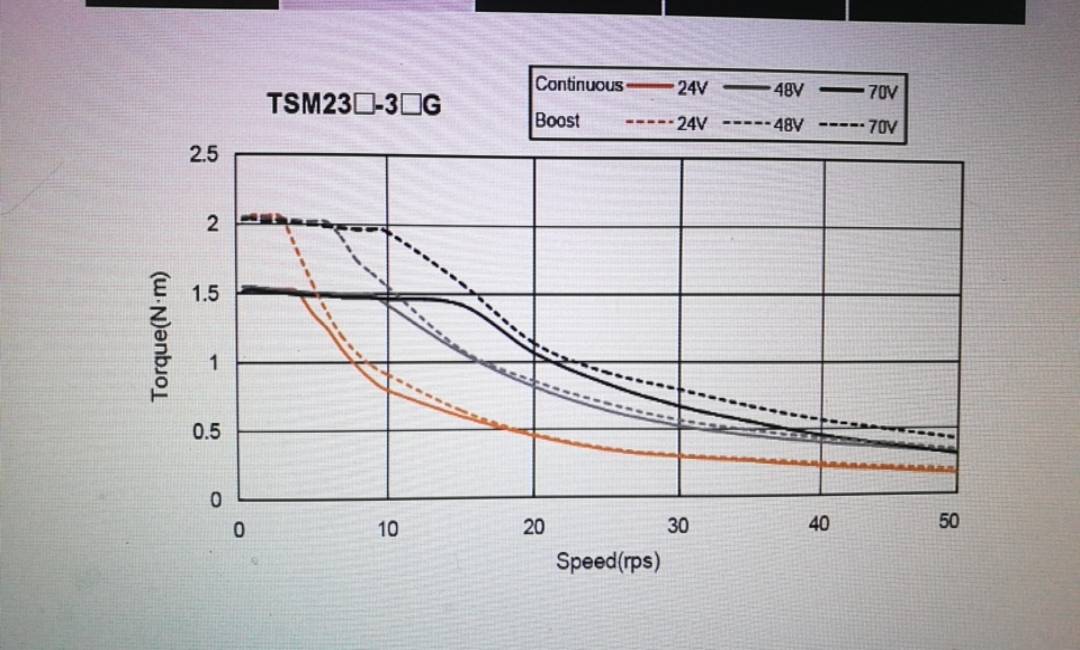
早想给您回,后来不得空耽误了。这么久没人回,估计一是没有人看。第二个可能就是别人懒得答这些问题了。我来理理您说的这些吧。伺服与步进的工作原理及特点不同,因此所标注的方式也就不一样。步进电机一般都是标注最大保持力矩。就是电机通电后不转时能保持的力矩。你也可以理解为这是它的最大力矩了,并且速度越快,力矩就越小。而伺服电机不太一样。因为伺服电机有项特殊的能力,就是瞬时过载力矩。一般来说,这个瞬时过载力矩是额定力矩的三倍(几十毫秒至几秒内)。而国外一些产品的短时瞬时过载力矩(几到几十毫秒内)能到达5至7倍,0至几秒内是三倍!伺服电机在一定转数后到额定转速区域内工作时,是能恒扭矩输出。超过了转数后,就是恒功率输出了。而步进电机会随着转数的升高而降低这点您是说对了的。伺服电机还有一个关键参数,就是惯量。一般分为低、中、高三种。如果是60的低惯量伺服,其扭矩是要比57步进要小的。但如果是中高惯量电机的力矩,那么57步进是没得比的。前面我也说过,伺服电机并不是惯量越高越好,要匹配。这些东西还有很多技术点要讲。你谈到这几个点我就说这几点。还有你给的上面的这个图,可能是您把单位搞错了。rps的英文是revolution per second 就是转每秒的意思。那个10就是600转每分了。如果是5mm导程的丝杠,f值就是3000了。步进电机的启动特性与伺服又不一样。步进有直接启动与加减速启动之说,而伺服一般只说加减速时间。至于步进与伺服的加速均匀性谁比谁一定好不能这样说。如果是在其工作范围内,相同的分辨率条件下,两者应该是一样的。另外再说一句,从您给的您这个电机的力矩图来看,在步进电机里算是不错的了。希望能帮到您! |
|