|
|
 发表于 2021-3-9 13:04:55
|
显示全部楼层
发表于 2021-3-9 13:04:55
|
显示全部楼层
本帖最后由 阿余 于 2021-3-9 13:08 编辑
+ P3 B5 k2 o7 G
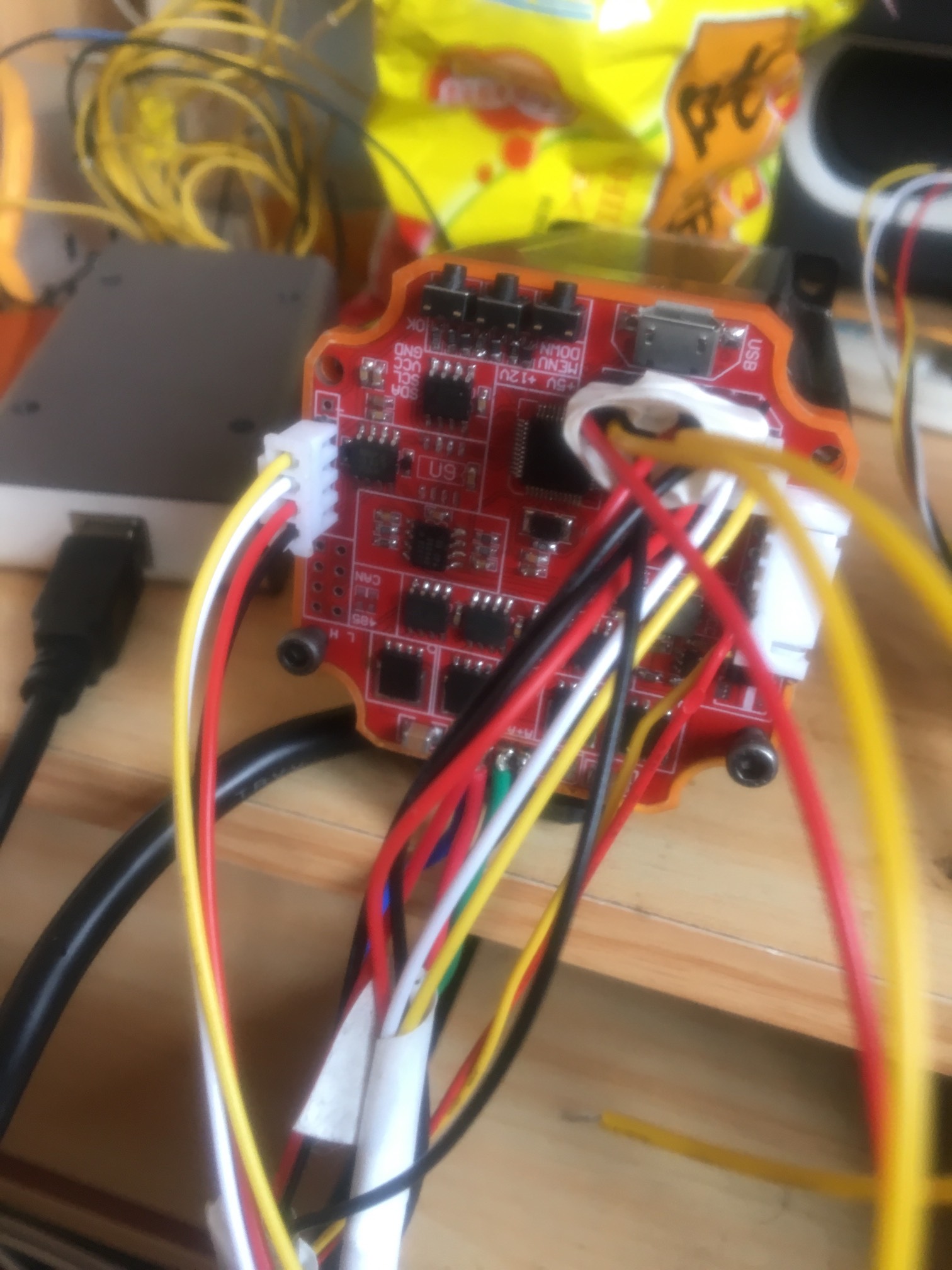
5 B0 g5 |1 d1 l- L4 p( ^是藏在电路板背面了吗? 编码器的, 论坛也有人做过.
3 |4 [0 g G x. P! ?
8 ` I) ~8 ~$ Y. P3 \我手上有几个早期的, 有人做的用普通电机加编码器, 加上一个控制器, 再加上普通驱动器, 这样构成的一个闭环步进,
' _$ F. Y% p+ w& I2 X3 E; N# c1 W
. [( c1 d" F( H0 f+ p2 k6 ]' q- z其实出来的效果也还可以, 比普通的步进, 可以跑得快很多. ; s1 I3 M8 R- J9 \' i1 Z8 \
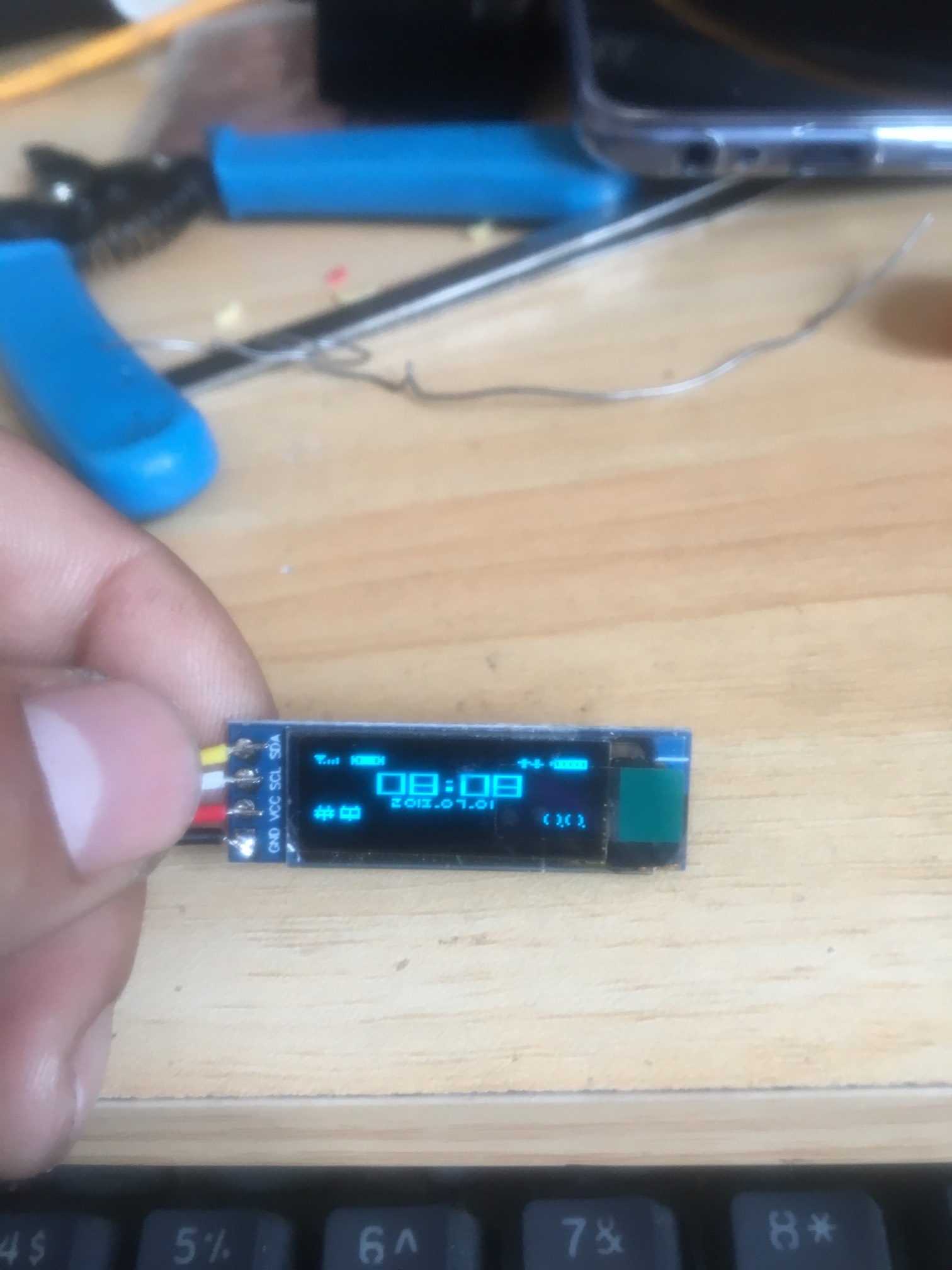
他在控制器上做了个屏, 可以显示这个轴跑了多少距离 ,显示的这个距离是从编码器那里读出来的, / o: g0 E3 {# Z
然后和MACH3上显示的比较, 看起来精度还不错.+ q0 Y- t6 E; ], y: S; p
3 u; [$ c# _: C% m. V o0 ^. B# K* Z
3 O! u( W) U+ I9 }& t |
|






![来报个到[呲牙]](http://piczuojiaju.cncdiy.cn/block/06/06acc05f8782fc3c9b40b04db3b0e565.jpg)

 我也一样
我也一样

 7 l. F" ~: t2 J% E! q( I
7 l. F" ~: t2 J% E! q( I 3 {/ G8 f$ s6 |; O
3 {/ G8 f$ s6 |; O