|
|
楼主 |
发表于 2021-5-17 01:54:55
来自手机
|
显示全部楼层
D、 Jl <(5~10)Jm
! y7 }9 `/ I; X3 o+ Q# W$ b) X8 G3 s2 t e0 }
E、 当负载惯量大于10倍的电机惯量时,速度环和位置环增益由以下公式可以推算 Kv=40/(m+1) 7<=Kp<=(Kv/3)
, l, c0 `+ v+ B
& [# m( A. O" |3 `: U- m+ S3 k10、 一般调整(非低刚性负载)$ o" Y% ?2 d% Z0 M* E
# Y% X2 A9 |- k% p2 p3 }' p. w t! Q
A、 一般采用自动调谐方式(可以选择常时调谐或上电调谐)* T$ a; R, O' j) _- [7 I
+ _6 y( d2 i+ i& Y$ XB、 如果采用手动调谐,可以在设置为不自动调谐后按照以下的步骤
" h& k2 ? B0 b# o0 n
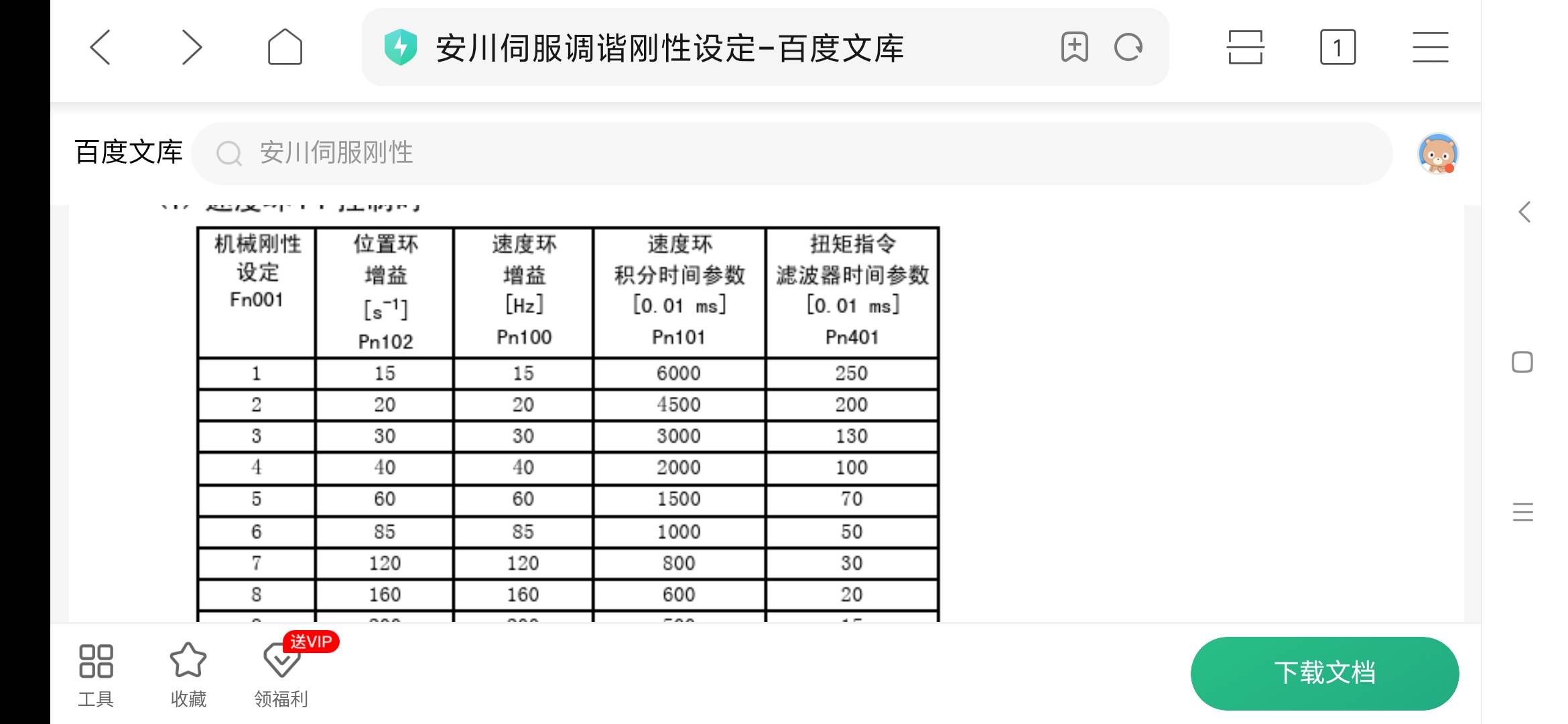
5 v# T2 p2 G t9 aC、 将刚性设定为1,然后调整速度环增益,由小慢慢变大,直到电机开始发生振荡,此时记录开始振荡的增益值,然后取50~80%作为使用值(具体视负载机械机构的刚性而论)* T2 A" d7 B$ U* }0 K2 n, b
, C% m8 g7 H9 C# WD、 位置环增益一般保持初始设定值不变,也可以向速度环增益一样增加,但是在惯量较大的负载时,一旦在停止时发生负载振动(负脉冲不能消除,偏差计数器不能清零)时,必须减少位置环增益;5 l" T% `7 g5 ~- G2 e
P/ k$ P, w/ C9 B- LE、 在减速、低速电机运行不匀时,将速度环积分时间慢慢变小,知道电机开始振动,此时记录开始振动的数值,并且将该数据加上500~1000,作为正式使用的数据。
' w# q7 y+ G; f0 |5 `
* h- S+ ?. B3 z- M. JF、 伺服ON时电机出现目视可见的低频(4~6/S)左右方向振动时(此时惯量此设定值很大),将位置环增益调整至10左右,并且按照C中所述进行重新调整;, r* p" w$ o% {+ W, c* H
9 O6 i& z0 c7 i8 s$ V! s n
11、 调整参数的含义和使用:
5 k8 c2 ~! t# e; O! F9 }% j3 ~2 ^# g. X7 r7 _: c# ]/ Q
A、 位置环增益: 决定偏差计数器中的滞留脉冲数量。数值越大,滞留脉冲数量越小,停止时的调整时间越短,响应越快,可以进行快速定位,但是当设定过大时,偏差计数器中产生滞留脉冲,停止时会有振动的感觉; 惯量比较大时,只能在速度环增益调整好以后才能调整该增益,否则会产生振动;
) f7 e9 o' r! E- a2 }& \, n
( `1 k7 q$ ~2 Q: c9 R+ mB、 位置环增益和滞留脉冲的关系:e=f / Kp 其中e是滞留脉冲数量;f是指令脉冲频率;Kp是位置环增益; 由此可以看出Kp越小,滞留脉冲数量越多,高速运行时误差增大;Kp过高时,e很小,在定位中容易使偏差计数器产生负脉冲数,有振动;$ v3 @" ^. \& J4 w9 W
/ L+ V; A8 ~/ y8 m& ~
C、 速度环增益: 当惯量比变大时,控制系统的速度响应会下降,变得不稳定。一般会将速度环增益加大,但是当速度环增益过大时,在运行或停止时产生振动(电机发出异响),此时,必须将速度环增益设定在振动值的50~80%。
/ k2 q6 R, x+ c) M) s6 \! k
4 u4 c2 F( E8 N) I6 o: @7 a2 N! WD、 速度积分时间常数: 提高速度响应使用;提高速度积分时间常数可以减少加减速时的超调;减少速度积分时间常数可以改善旋转不稳定 |
|








 ! P. S& \ T" Q$ q" M% M* b
! P. S& \ T" Q$ q" M% M* b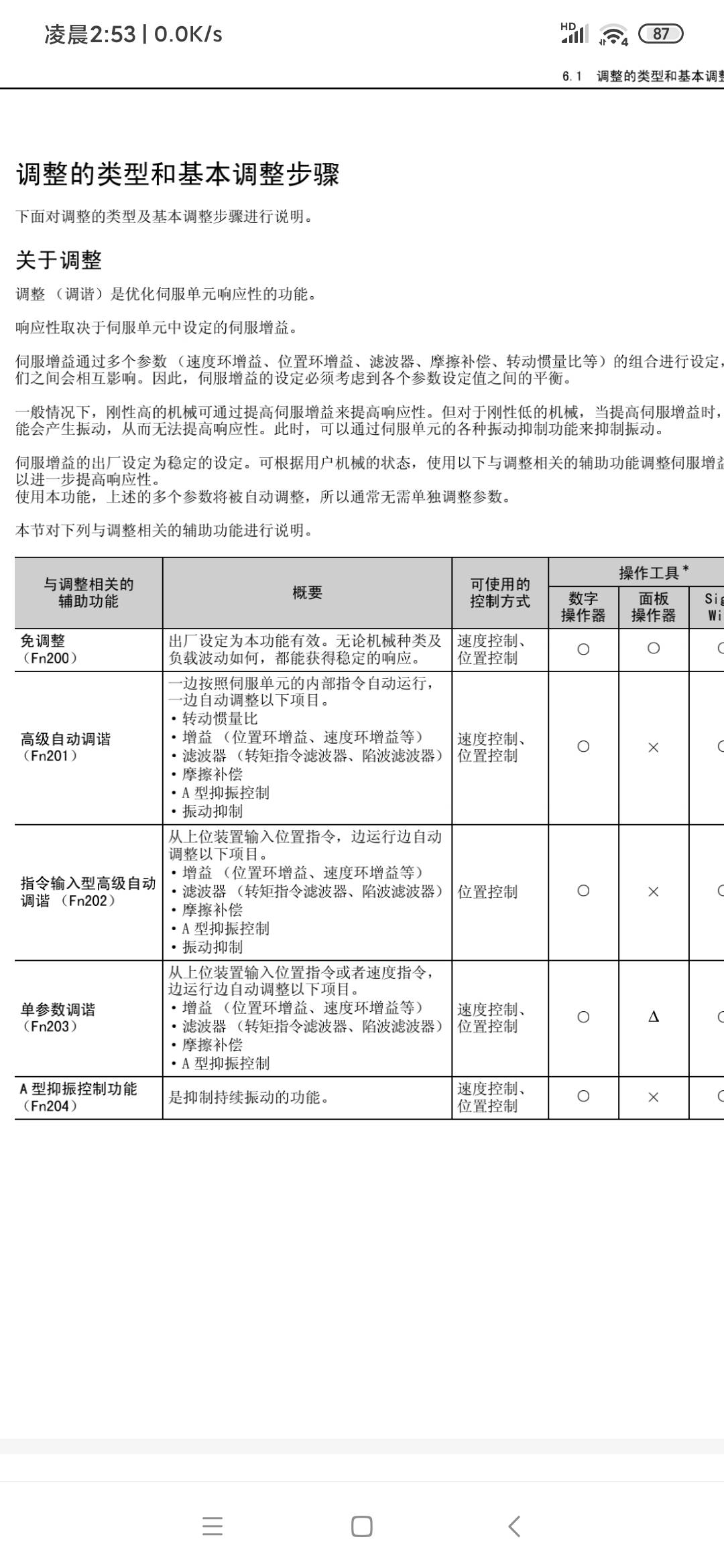
 . Q# x Q) ?6 F/ z N o" {% d
. Q# x Q) ?6 F/ z N o" {% d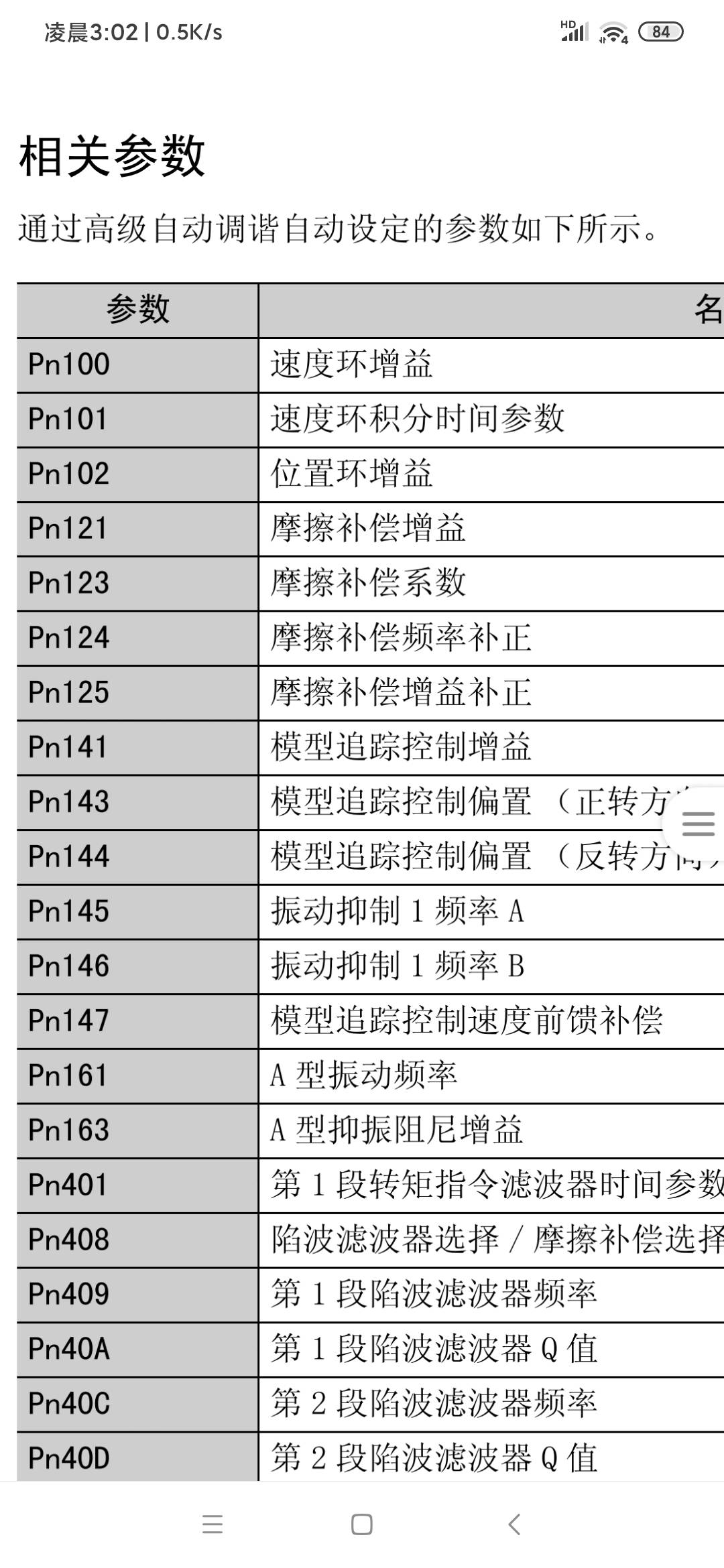
 发表于 2021-5-17 13:25:47
发表于 2021-5-17 13:25:47



